
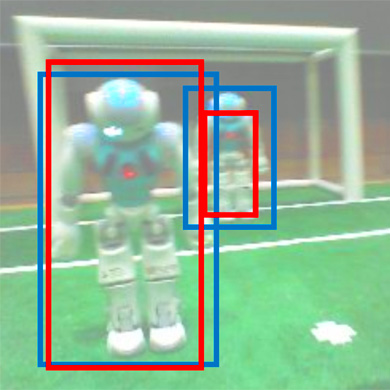
Ball and Penalty Mark Detection
This dataset contains images of ball, penalty marks and negatives examples.
https://b-human.informatik.uni-bremen.de/public/datasets/BallAndPenaltyMarkPerceptorB-Human
This dataset contains images of ball, penalty marks and negatives examples.
https://b-human.informatik.uni-bremen.de/public/datasets/BallAndPenaltyMarkPerceptor
This dataset contains images of line intersections. Images are stored as png files and the last part of the filename is the distance between robot and intersection in mm.
https://b-human.informatik.uni-bremen.de/public/datasets/intersectionsClassifierV2/
This dataset contains images of goal posts and negative examples for the purpose of binary classification. Images are stored as png files and the last part of the filename is the distance between robot and goal post in mm. For the purpose of detecting goal posts a second dataset in JSON format is provided that contains the image coordinates of the base point for each image of a goal post.
https://b-human.informatik.uni-bremen.de/public/datasets/goalPostClassifier/
The dataset contains the requested and measured joint angles of the leg joints of all B-Human robots during walking, recorded on multiple different fields during four full RoboCup tournaments in 2019 and 2022.
https://b-human.informatik.uni-bremen.de/public/datasets/joint_angles/
Arne Hasselbring, Andreas Baude. RoboCup 2021 Symposium (2022).
This dataset that can be used to train a fieldboundary detection. The images are stored binary and every image has a label that consists of 4 values for each direction.
https://b-human.informatik.uni-bremen.de/public/datasets/fieldboundary/
Jan Blumenkamp, Andreas Baude, Tim Laue. In RoboCup 2021 Symposium (2022).
Bernd Poppinga and Tim Laue. In Stephan Chalup, Tim Niemueller, Jackrit Suthakorn, and Mary-Anne Williams, editors, RoboCup 2019: Robot World Cup XXIII, volume 11531 of Lecture Notes in Artificial Intelligence, pages 227–240. Springer, 2019.

